Embedded/RoboticsResearch
On-Body BLE + IMU Localization System
Real-time body segment tracking using sensor fusion of BLE RSSI and IMU data
ESP32BLEIMU (BNO08x)PythonMLXsens Motion Capture
At a Glance
Role: Lead Researcher
Team Size: 2
Timeframe: Jan 2024 – May 2025
4cm RMS
Position Accuracy
95%
Cost Savings
40 Hz
Update Rate
IEEE Sensors Letters
Research paper submitted
Problem
Accurate body segment localization is critical for rehabilitation and sports biomechanics, but commercial motion capture systems are expensive and require controlled environments. We needed a low-cost, portable solution that could achieve comparable accuracy.
Constraints
- Budget limited to $500 for hardware
- System must be wireless and portable
- Latency under 50ms for real-time feedback
- Must validate against gold-standard Xsens system
My Contribution
- 1Designed custom sensor module with ESP32 microcontrollers, BLE modules, and IMUs
- 2Implemented extended Kalman filter for sensor fusion of RSSI-based positioning and IMU orientation
- 3Developed Python data acquisition pipeline with real-time visualization
- 4Created validation protocol comparing against Xsens MTw Awinda system
What I Built
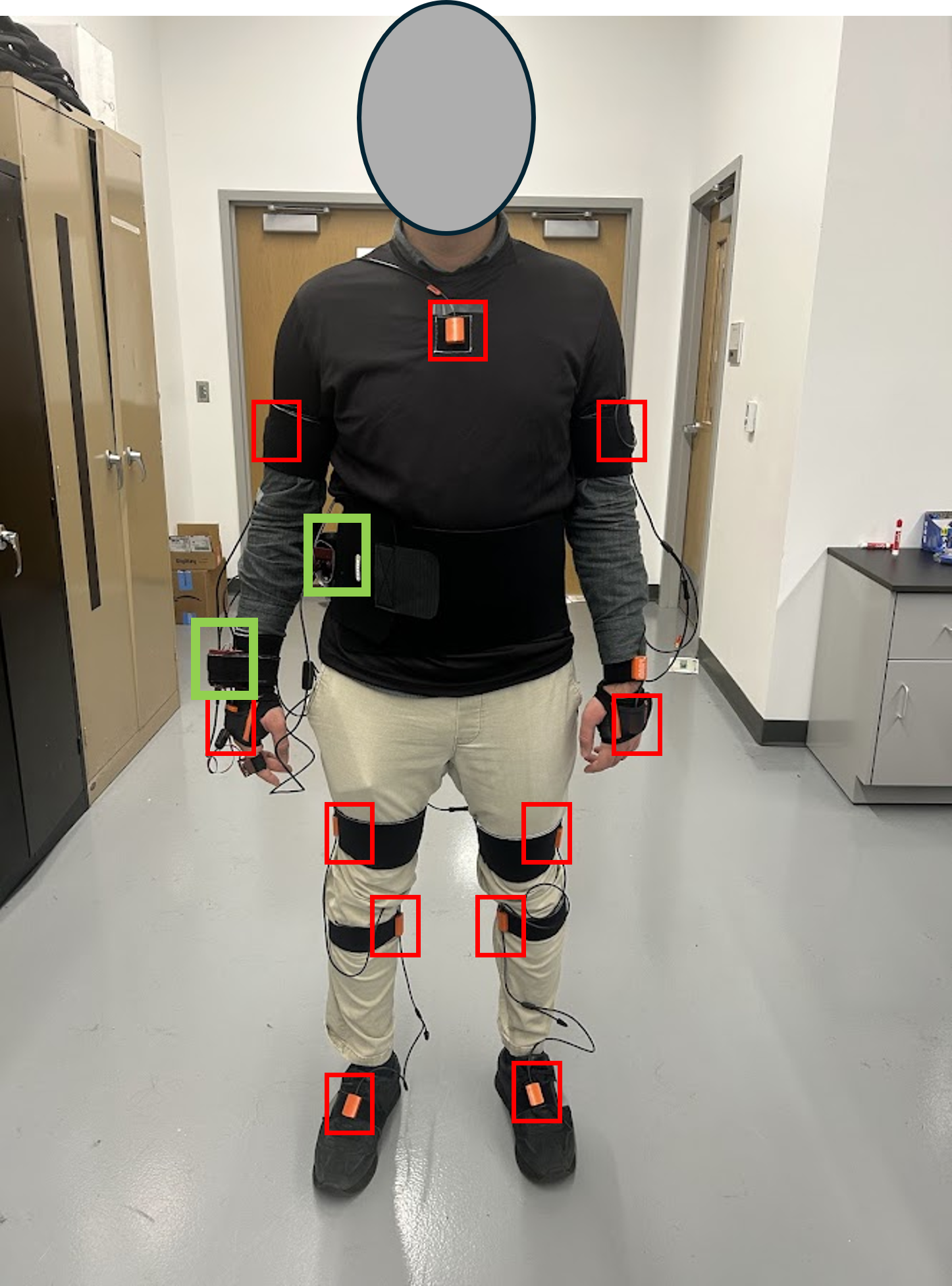
- Designed and 3D printed compact sensor housings for on-body placement
- Programmed ESP32 firmware for synchronized BLE advertising and IMU data streaming
- Developed custom calibration routine for IMU drift compensation
- Developed machine learning model to improve RSSI distance estimation.
Testing & Validation
- Static positioning tests at known distances (0.5m - 1m range)
- Dynamic motion trials with controlled arm movements
- Long-duration drift analysis (30-minute continuous operation)
- Side-by-side comparison with Xsens ground truth
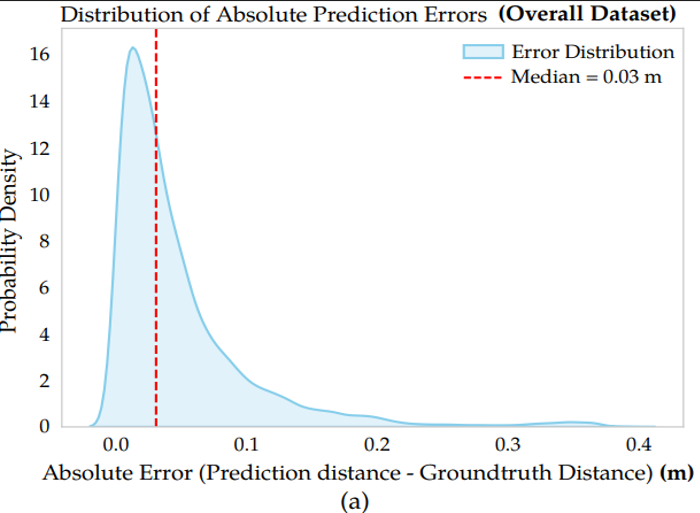
Results
- Achieved position accuracy within 4cm RMS error at distances up to 1m
- System cost reduced by 95% compared to commercial alternatives
Gallery

Lessons Learned
BLE RSSI is highly sensitive to body shadowing—antenna placement is critical
IMU calibration drift requires periodic re-calibration for sessions over 15 minutes
Sensor fusion tuning is application-specific; aggressive filtering trades accuracy for stability